Шагоходы, или шагающие машины, — разнообразные машины, передвигающиеся при помощи сгибающихся или вращающихся на шарнире опорных конструкций («ног»), методом их синхронизированной поступательной перестановки (внешне напоминающей шаг человека или животного, то есть машины на «шагающем» ходу) с гидравлическими, механическими, электрическими и другими приводами указанных конструкций и их комбинациями — электромеханическими, гидромеханическимии т. д.
Ввиду конструктивной сложности исполнения, неясности целевого предназначения, и как следствие, неопределённости сферы практического применения с одной стороны, а с другой стороны — дешевизны, надёжности и простоты в эксплуатации сухопутных машин на традиционных вариантах подвижной платформы (в первую очередь, колёсной, гусеничной, рельсовой, канатно-тросовой, а также фрезерно-кольцевой, магнитно-левитационной и др.), шагающие машины пока не получили в реальной жизни большого распространения. Из используемых на практике механизмов можно назвать шагающие экскаваторы. Другими немаловажными факторами, препятствующими внедрению их в промышленность и народное хозяйство (как, впрочем, и внедрению в качестве военной техники) и требующими решения, являются энергозатраты, относительно высокие сами по себе и возрастающие по мере увеличения массы перемещаемого тела машины, длины подвижных опорных конструкций (шагающих «конечностей») и амплитуды шага, а также вестибулярные нагрузки на человека-оператора (водителя) ввиду неустойчивого положения кабины оператора в «двуногих» и «четвероногих» моделях (поэтому основное направление работ, реализующее такие варианты конфигурации шагающих опорных конструкций — робототехника, не требующая нахождения человека в машине и управляемая дистанционно или бортовым компьютером с заложенным алгоритмом действий).
Шагоходы весьма популярны в научной фантастике как возможные примеры наземной техники (в том числе боевой), — в частности встречаются в аниме и манге, где активно используются в качестве жанровой особенности меха-сэнтай. В сравнении с колёсной и гусеничной техникой шагоходам свойственна повышенная проходимость по пересечённой местности. Главной проблемой в создании шагоходов является соотношение цены и эффективности (в том числе маршевой скорости движения), а также отсутствие достаточно энергоёмких и при этом компактных источников энергоустановки и быстродействующих приводов для ходовых ног. Однако сейчас уже ведутся разработки по созданию полноценных шагающих машин.
Создателем первого шагохода в современном понимании этого слова можно считать русского учёного П. Л. Чебышёва, который в 1860-х — 1870-х гг. ставил эксперименты с шагающими механизмами различной конфигурации[1] Тем не менее, ни промышленность, ни наука тех лет не востребовали такого рода устройства и они ещё долгое время существовали в виде причудливых изобретений, игрушек и т. п. Об их практическом применении для решения промышленных или военных задач речи не шло. Первое рационализаторское предложение использовать шагоходы для военных целей относится к 1940 году, — на начальном этапе Второй мировой войны, под впечатлением от успехов Вермахта во Франции, британские учёные, сотрудники инженерной компании «Аллен & Ко» А. Хатчинсон и Ф. Смит предложили создать тысячетонный ходячий танк (1000-ton walking tank) на четырёх опорных конечностях, чтобы эффективно противостоять немецким Панцерваффе. Под их руководством инженерами компании была составлена подборка чертежей и технической документации для промышленного производства указанного изобретения. Подвесная система ходячего танка теоретически обеспечивала ему устойчивость в движении по неровной поверхности. Заинтересовать британские имперские органы управления военной промышленностью и наукой данным проектом не удалось и замысел в планируемом виде не был реализован, Военное министерство прекратило финансирование проекта в пользу более практичных направлений работы и учёным лишь удалось сконструировать опытный прототип ходячего танка меньших размеров (без вооружения) который имел зооморфный вид, некое подобие вращающихся тазобедренных и коленных суставов (rolling thigh joint), управляемых системой тросов, опутывавших опорные конечности машины и сходившихся в консоли оператора. Оператор управлял машиной усилием рук и ног на рычаги и педали соответственно. Рычаги приводили в движение передние конечности, педали — задние конечности. Механические усилия оператора передавались на сгибы опорных конечностей посредством гидроусилителей. Машина успешно взбиралась на возвышения типа кучи книг[2].
Начало развитию шагающих машин было положено в послевоенное время, в 1950-е годы. В 1954 году в США была инициирована программа проведения фундаментальных исследований и научно-исследовательских работ по тематике создания «природных машин», реализующих в своей конструкции естественные формы и способы локомоции живых существ. За пределы чертежей и обоснования нецелесообразности технического воплощения подобного рода затеи дело тогда не пошло. Дальше всех среди задействованных научных учреждений продвинулся Ратгерский университет, группа учёных которого под руководством заведующего кафедрой машиностроения, профессора Р. К. Бернарда фактически задала направление всех последующих работ в этом направлении. Учёные как следует проработали теоретическую сторону вопроса разработки биомеханических движителей и проэкзаменировали миниатюрные модели шагающих, бегущих, скачущих, галопирующих, прыгающих и ползучих устройств. Из всех исследованных форм именно «рычажная машина» (levered vehicle) в подпрыгивающем или шагающем варианте реализации, по мнению учёных в наибольшей степени подходила для выполнения различных военных задач. При этом именно подпрыгивающая машина была признана идеальным вариантом такого рода, за образец для копирования конечностей и движений среди представителей фауны конструкторским учреждениям предлагалось брать обыкновенных кузнечиков. Тем не менее, было признано и то, что такой вариант является наиболее сложным для технической реализации, поскольку непременно требует для себя дополнительных средств корректирования траектории полёта (те же кузнечики имеют для этого крылья, позволяющие им корректировать траекторию полёта и увеличивающие точность приземления, а кенгуру пользуются хвостом), не говоря о динамических нагрузках на опорные конечности в момент толчка и особенно приземления. Поэтому, несмотря на то, что подпрыгивающие машины превосходили шагающие в скорости и маневренности, последние были признаны более простыми для технической проработки. Машиностроительному факультету Мичиганского университета под руководством декана факультета, профессора Джозефа Шигли было поручено разработать модели трансмиссии и передач для такого рода машин. Собственно, именно перед проф. Шигли и его коллективом научных работников было поставлено то, что можно назвать тактико-техническим заданием из десяти пунктов вполне конкретных по сути (8 из 10 пунктов соответствовали принципам передвижения живых существ и только 2 имели явно искусственное происхождение), поскольку все предыдущие работы носили абстрактный характер. Коллектив Мичиганского университета создал машину на 16 конечностях с ручным управлением оператором из кабины, расположенной на становой несущей части («спине») конструкции машины. Именно мичиганский прототип и работы, проведенные под руководством проф. Шигли дали богатый объём эмпирических данных относительно реализуемости/нереализуемости более ранних конструкторских замыслов шагающих машин. Чуть позже, Шигли опубликовал в сжатом виде выводы по итогам проведённых им исследований в журнале «Нью сайентист». В начале 1960-х гг. паукообразное шагающее устройство с кривошипным механизмом преобразования энергии вращения двигателя в поступательные движения опорных конечностей было сконструировано Лабораторией сухопутной локомоции (Land Locomotion Laboratory) Детройтского арсенала в Уоррене, штат Мичиган[3].
Тем не менее, все перечисленные эксперименты скорее предназначались не для подтверждения, а наоборот, для опровержения научно-практическим способом разнообразных завиральных теорий и идей, и осуществлялись либо на малых фондах, либо на самофинансировании. Интенсификация работ по созданию шагающих машин (преимущественно зооморфного вида, на четырёх и шести опорах) в США пришлась на середину 1960-х гг. и совпала по времени с интенсификацией американского военного вмешательства в Юго-Восточной Азии в ходе Второй Индокитайской войны. В связи с обнаружившейся на начальном этапе эскалации военных действий во Вьетнаме неподготовленностью Вооружённых сил США к действиям в тропических и субтропических лесах, предприятия американской военной промышленности бросились спешно восполнять выявленный пробел, наперебой предлагая командованию сухопутных компонентов различных видов вооружённых сил свои проекты сухопутных и амфибийных машин, отличавшихся повышенной проходимостью в сравнении с традиционными колёсными и гусеничными машинами, что дало толчок развитию машин со шнекороторным движетелем, машин с гибким шасси (flexible frame vehicles), сочленённых машин (articulated vehicles), машин с эллипсоидными колёсами (elliptical wheeled vehicles), гусеничным движителем с надувными катками, боевых и транспортных машин на воздушной подушке, разного рода подлетающих машин и «летающих джипов», средств индивидуальной аэромобильности на реактивной и винтовой тяге. Получили развитие и шагоходы.
«Ленд-Уокер» (живопись)
21 апреля 1964 года на Нью-Йоркской всемирной выставке был открыт павильон Департамента армии США «Армейская мобильность: Взгляд в будущее» (Army Mobility Looks to the Future), где среди восьми перспективных концептов футуристических средств обеспечения подвижности сухопутных войск в виде эскизов и картин был представлен шагоход «Ленд-Уокер» (Army Landwalker) на четырёх опорных конечностях («ногах») с четырьмя рычажными манипуляторами («руками»), офицеры транспортно-логистической службы разъясняли посетителям выставки направления работы научно-исследовательских учреждений Транспортного управления Армии США на перспективу и потенциал для применения указанного типа машин[4].
Агентство по перспективным научно-исследовательским разработкам США (ДАРПА), традиционно покровительствовавшее разного рода революционным идеям, инициировало программу «Эджайл» (AGILE), в рамках которой финансировался целый ряд проектов транспортных средств с нетрадиционными вариантами движителя, проходивших испытания в континентальных штатах, а также в контролируемой американским военным контингентом зоне Панамского канала (известно, что испытания прошло свыше тридцати опытных прототипов машин с различным типом движителя, однако, достоверно неизвестно были ли среди них образцы шагающей техники). Спектр потенциального применения шагоходов предусматривал их задействование для противопартизанских мероприятий, форсирования водных преград с крутыми берегами и быстрым течением, марш-бросков в горно-скалистой местности. В целом, сама атмосфера 1960-х годов, обилие достижений научно-технического прогресса того периода внедрённых в повсеместный обиход, благоприятствовали освоению разнообразных революционных направлений развития техники военного и невоенного назначения, — ни до, ни после того десятилетия ничего подобного по масштабу и размаху не имело места в мировой истории. Полёт технической фантазии проектировщиков был ограничен только реальными возможностями шагающей техники (которые были весьма ограничены), существующей производственной базой и органами бюджетного контроля, которые нещадно «рубили» перспективные направления работ, «выбивая» финансирование из-под любых проектов такого рода и возвращая их обратно в стадию бумажного проектирования. Логика рационализаторов, подводивших под проекты такого рода финансовое и производственно-техническое обоснование, была достаточно простой и опиралась на суждения о высокой проходимости данного типа техники:[5] «На определённых типах местности лошадь стоимостью пятьдесят долларов превзойдёт танк стоимостью четверть миллионов долларов».[6]
Проблема с технической реализацией указанного суждения заключалась в том, что варианты воплощения «механических лошадей» в металле обходились не намного дешевле танков за четверть миллионов долларов. Кроме того, промышленное лобби, кормившееся от танковых заводов, выпускавших гусеничную бронетехнику и связанное с высшими политическими кругами, не дало бы ни под каким предлогом посягнуть на застолблённые им сектора федерального бюджета, поэтому даже речи о принятии на вооружении и серийном производстве шагающей военной техники в обозримой перспективе не шло. Тем не менее, промышленному гиганту «Дженерал электрик» удалось монополизировать направление развития шагающей техники (свои собственные проекты индустриальной робототехники велись «Дженерал электрик», «Дженерал моторс», «Вестингауз»)[7] и получить ряд заказов на проведение опытно-конструкторских работ отделом вооружения подразделения военной электроники (Ordnance Department of the Defense Electronic Division) в Питсфилде, штат Массачусетс. В немалой степени, «двигателями» этого процесса выступали сами же сотрудники компании, длительное время занимавшиеся в частном порядке опытами с шагоходами, главным идейным вдохновителем которых можно назвать Ральфа Мошера, который посвятил много лет работе над этой тематикой. Параллельно с «Дженерал электрик» проект собственного «шагающего грузовика» (с кузовом как у обычного грузовика) разрабатывался под руководством Рональда Листона подразделением сухопутной локомоции Лаборатории средств обеспечения подвижности (Land Locomotion Division, Mobility Systems Laboratory) Автобронетанкового управления Армии США в Уоррене, штат Мичиган. Тогда же, упомянутый учёный — Листон получил специальную премию Министра армии США на проведение исследований по заданной тематике совместно с научными работниками Мичиганского технологического университета, что подчёркивало важность и приоритетность данного направления исследований для военного руководства[8] Тем не менее, работы не продвинулись дальше создания инженерами деревянных макетов в натуральную величину и одного незавершённого опытного прототипа Автобронетанкового управления, а также одного опытного прототипа компании «Дженерал электрик» прошедшего испытания, но не пошедшего в серию[6][9]. К началу 1970-х гг. действия американских войск на сухопутном театре военных действий Вьетнамской войны стали сходить на нет, переместившись в плоскость нанесения авиаударов по крупным административно-промышленным центрам противника и действиям тактической авиации в собственном тылу. В этих условиях сухопутные машины повышенной проходимости стали не нужны и практически все проекты такого рода ведшиеся до того момента были прекращены, многие навсегда. Советские опыты в этот же период, в направлении создания некоего подобия шагоходов для практического использования под водой ограничились серией необитаемых телеуправляемых аппаратов (информационно-управляющих комплексов) «Манта», разработанных Институтом океанологии АН СССР и испытанных в 1971—1973 гг.[10]
Оставшиеся в виде чертежей, макетов и кадров документальной кинохроники образцы шагающей техники инспирировали писателей-фантастов и деятелей американского кинематографа включить оную в свои художественные труды. Второе рождение шагающей техники в США произошло на волне завершения периода Детанта и повторного нарастания международной напряжённости в период очередного витка американо-советской конфронтации. На волне инициированной Президентом США Рональдом Рейганом программы Стратегической оборонной инициативы («Звёздных войн») получил развитие целый ряд проектов создания оружия на новых принципах. Среди прочих, в июле—августе 1983 года Университет штата Огайо в Колумбусе получил не много, ни мало, как контракт на разработку «ходячего танка» (walking tank). В научной прессе этот эпизод прокомментировали скорее в шутку, что военное командование насмотрелось фильмов из цикла «Звёздные войны» (где присутствовали весьма реалистические батальные сцены с «имперскими шагоходами» на двух- и четырёх конечностях). Основанием для вложения бюджетных средств была всё та же проблема повышения проходимости сухопутной техники, поскольку в агентстве настаивали на том, что половина земной поверхности принципиально непроходима для колёсной и гусеничной техники[11]. Третье рождение шагающей техники, теперь уже роботизированной, без оператора внутри, пришлось на период американского военного вмешательства в странах третьего мира, но опять не продвинулось дальше создания опытных прототипов.
Гибриды
Пропоненты создания и широкого внедрения шагающих машин, в частности тот же Мошер, понимая, что внимание высшего руководства ушло безвозвратно, пытаясь реанимировать саму идею шагоходов, предлагал промежуточные и комбинированные варианты движителей: колёсно-шагающие, гусенично-шагающие, шагающие-плавающие и т. д. Во всех перечисленных вариантах, машина имела основной и вспомогательный движители. Шагающим конечностям отводилась роль вспомогательного движителя, предназначенного, например, для движения по мягким, зыбким и вязким грунтам,[12] самостоятельного извлечения машиной себя самой из вязкого грунта,[13] буксировки, подталкивания и выталкивания других застрявших машин,[14] придания машине устойчивого положения на неровном грунте для более точного наведения вооружения и выполнения другой полезной работы,[15] создания дополнительных точек опоры для компенсации силы отдачи ствольного оружия, массы перемещаемого груза при погрузочно-разгрузочных работах,[16] обслуживания подводных военных объектов и баз,[17] а также для других нужд. Альтернативным вариантом были машины с модульными рычажными устройствами (modular legs), позволяющими машине выполнять функции подъёмного крана, буксира и др. В таком виде, речь уже шла не о шагающих, а о рычажных машинах, где рычаг(и) мог использоваться для различной механической работы, в том числе и для передвижения машины-носителя[18]. Кроме уже описываемых выше машин с опорными конечностями, предлагались варианты колёсных шагоходов (wheel walker), где в качестве опор использовались продольные колёсные пары на гибкой независимой подвеске, шагающие методом проворота колёсной пары вокруг своей оси[19].
Буксир толкач/тягач
Устройство повышения устойчивости
Устройство извлечения машины из вязкого грунта
Ракетная пусковая установка
Многоцелевой рычажный механизм
Многоцелевой рычажный механизм
Бротетранспортёр M113 с вспомогательным шагающим движителем
Во второй половине 1980-х гг. корпорации «Мартин-Мариэтта» удалось подвести финансирование ДАРПА под очередную программу создания автономных сухопутных машин (Autonomous Land Vehicle Project) с различным типом движителя[20]. В данном случае под «автономными» понимались роботизированные машины без операторов и без кабины, действующие в полностью автономном режиме по заложенной программе, либо в полуавтономном режиме по командам с пульта дистанционного управления. Начальным этапом программы стало компьютерное моделирование передвижения животных (Computer Simulation of Animal Navigation, CSAN),[21] для чего был разработан специальный программно-аппаратный комплекс с различными типами моделируемой местности[22]. Насколько далеко удалось продвинуться инженерам из «Мартин-Мариэтта» остаётся неизвестным.
1892 — американский изобретатель и рационализатор Льюис Рюгг из Сент-Пола, Миннесота, подал патентную заявку в Патентное ведомство США на изобретение педального «механического коня» (mechanical horse) переставляющего копыта-опоры путём «пришпоривания» ездоком — нажатия на стремена. Были ли попытки реализовать замысел в металле неизвестно[25][26]
1913 — американская компания Monighan Machine Co. построила первый шагающий экскаватор на основе разработки инженера Остина Мартинсона[27]
1940 — Ш. на 4-х конечностях спроектирован W. H. Allen & Company Ltd в Лондоне, по заказу Военного министерства Великобритании построена и испытана в лабораторных условиях модель малых размеров. Рук. — А. Хатчинсон и Ф. Смит[28]
1961 — Ш. на 8-и конечностях Iron Mule Train («железный мул») создан подразделением Space Division корпорации Aerojet-General в Эль-Монте, Калифорния. Рук. — Р. Альберт Моррисон[29]
1968 — Ш. на 4-х конечностях Walking Truck создавался подразделением сухопутной локомоции Лаборатории средств обеспечения подвижности Автобронетанкового управления Армии США. Завешены только макеты в натуральную величину, опытный прототип не окончен. Рук. — Рональд Листон
1977 — первый шагоход с автономным управлением на 6-ти конечностях Hexapod изготовлен в лабораториях Университета штата Огайо в Колумбусе. Рук. — Р. Макги[29]
1983 — Робот-шагоход с автономным управлением на 6-ти конечностях Odex изготовлен подразделением усовершенствованных интеллектуальных машин (Advanced Intelligent Machines Division) корпорации Odetics в Анахайме, Калифорния по заказу корпорации RCA[37][38]
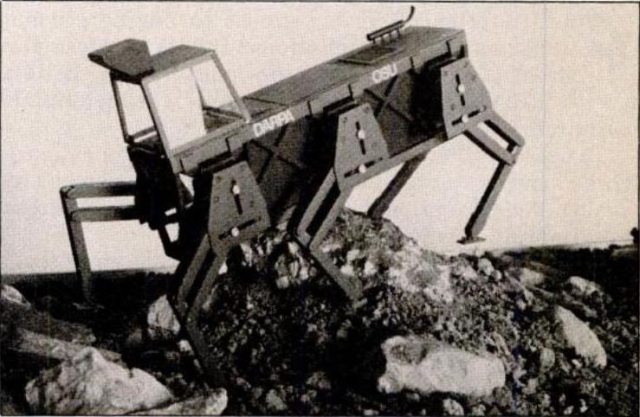
1984 — Ш. на 6-ти конечностях Adaptive Suspension Vehicle (ASV) изготовлен в лабораториях Университета штата Огайо в Колумбусе по контракту ДАРПА. Рук. — Р. Макги, К. Уолдрон[39][40][41]
1987 — демонстрация манёвренных возможностей Adaptive Suspension Vehicle (ASV) признанного учёной общественностью лучшим роботом-шагоходом современности. Рук. — Р. Макги, К. Уолдрон[1]
1991 — в лабораториях МИТ прошёл первые испытания прыгучий робот-кенгуру на 3-х конечностях (две «лапы» и «хвост»). Рук. — М. Райберт[44]
1993 — изготовленные в лабораториях МИТ робот-кенгуру на 3-х конечностях и двуногий «байпед» на 2-х конечностях «снимаются» в кино в эпизодической роли (остросюжетный голливудский боевик «Восходящее солнце»). Реж. — Ф. Кауфман[44]
1993 — изготовленный в лабораториях МИТ робот-таракан на 6-ти конечностях имитирует движения настоящего таракана, успешно передвигается по лаборатории. Рук. — М. Райберт[44]
В настоящий момент шагоходы (также часто называемые «ме́хи») разрабатываются американской фирмой «Mechanized Propulsion Systems». Представители фирмы обещают создать образец, пригодный для боевого применения, к 2025 году.
Одно из первых появлений шагающих машин состоялось в книгах классиков фантастики: Жюля Верна, в его романе «Паровой Дом», и у Герберта Уэллса «Война миров» (словосочетание «боевые треножники» стало нарицательным).
В массовой культуре
Список фильмов и компьютерных игр, в которых появляются шагоходы
В фильме «Война миров» используют гигантские боевые треножники.
Шагоход использовался в одной из вымышленных сцен-мечтаний главной героини фильма «Запрещённый приём».
В фильме «Защитники» можно увидеть треножные боевые машины, управляемые как и вручную, так и автоматически, при помощи установки ПУМ. Вооружены многоствольными пулемётами, пушкой и управляемыми ракетами. Были захвачены Августом Куратовым при помощи устройства «Модуль-1».
Компьютерные игры
В компьютерных играх Chrome и Chrome SpecForce есть возможность управлять несколькими видами двуногих шагоходов.
В серии игр MechWarrior это основное устройство, которым управляет игрок. В серии игр MechCommander, а также на любительском MMO MegaMek игрок управляет подразделением подобных устройств в комбинации с другой техникой.
Сюжеты компьютерных игр серии Metal Gear основаны на захвате террористами шагающих танков Metal Gear, которые являются ходячими платформами для запуска ядерных ракет. В конце почти каждой игры серии игрок должен уничтожить Metal Gear.
В играх серии Half Life 2 на вооружении Альянса стоят страйдеры (англ.strider — «шагун»), боевые шагоходы, похожие на описанные Гербертом Уэллсом треножники марсиан.
Игра Titanfall почти полностью построена на управлении титаном, являющимся шагоходом.
В игре Supreme Commander многие создаваемые юниты являются шагоходами.
Raibert, Marc H. ; Brown, H. Benjamin ; Chepponis, Michael ; Koechling, Jeff, et al. Dynamically Stable Legged Locomotion. — Cambridge, MA: MIT Artificial Intelligence Laboratory, September 1989. — 203 p.
Raibert, Marc H. ; Brown, H. Benjamin ; Chepponis, Michael ; Hastings, Eugene ; Murthy, Seshashayee S. ; Wimberly, Francis C.Dynamically Stable Legged Locomotion. — Pittsburgh, PA: Carnegie-Mellon University, Robotics Institute, 27 January 1983. — 120 p.
Raibert, Marc H. ; Brown, H. Benjamin ; Chepponis, Michael ; Hastings, Eugene ; Shreve, Steven E. ; Wimberly, Francis C.Dynamically Stable Legged Locomotion. — Pittsburgh, PA: Carnegie-Mellon University, Robotics Institute, 30 November 1981. — 67 p.














{kind=link}
{kind=link}